After considering designing a couple of robotic arms to hold the cell phones, we decided to use Stewart Platforms instead.
I think this will give us a broader range of expressive movements, without having to move the phones large distances, and it also gives the structure a more abstract physical look; one that isn’t so easily anthropomorphized.
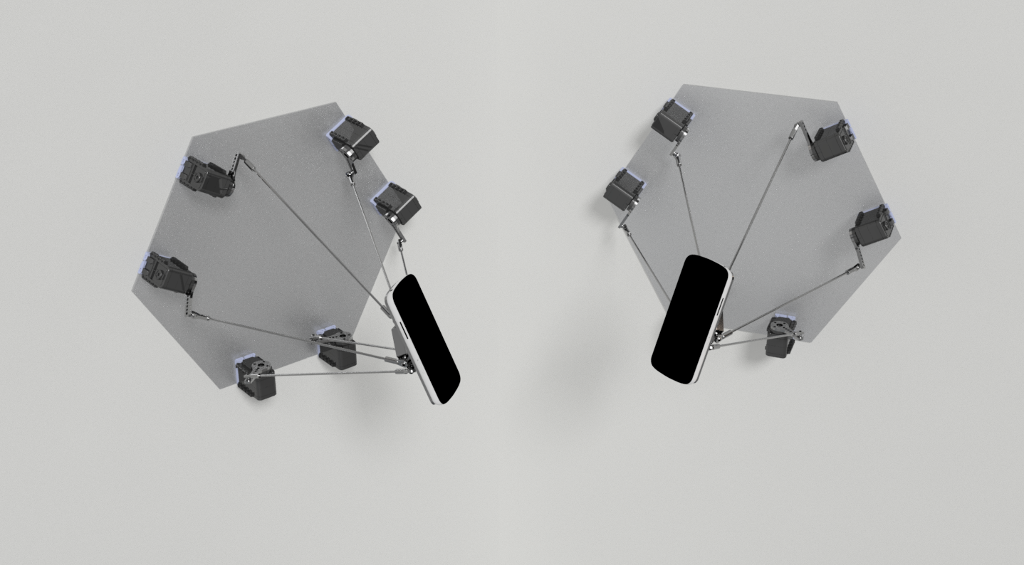
Here are some sketches done in Fusion 360.
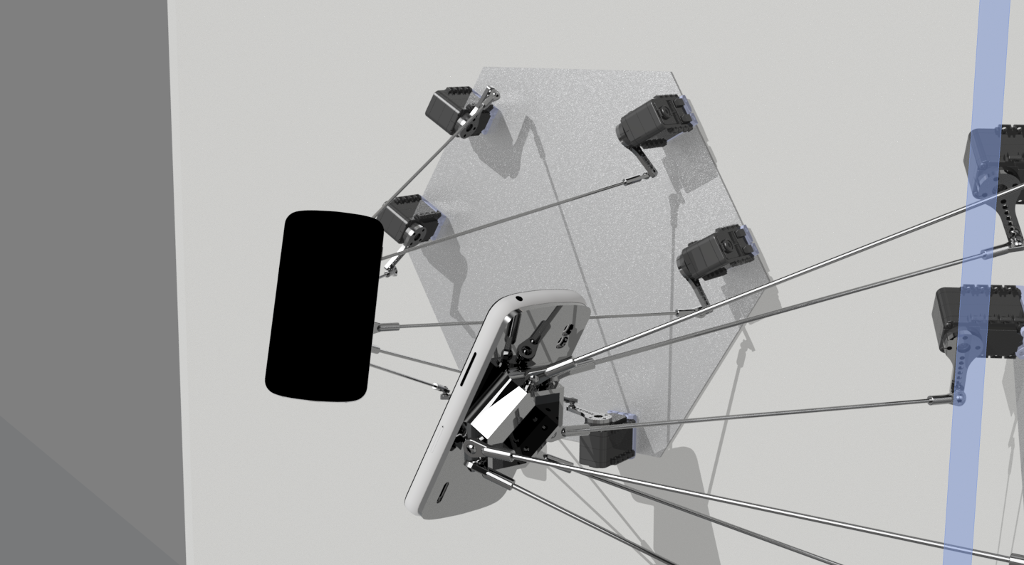
A small demonstration of the kinds of movement that it can achieve:
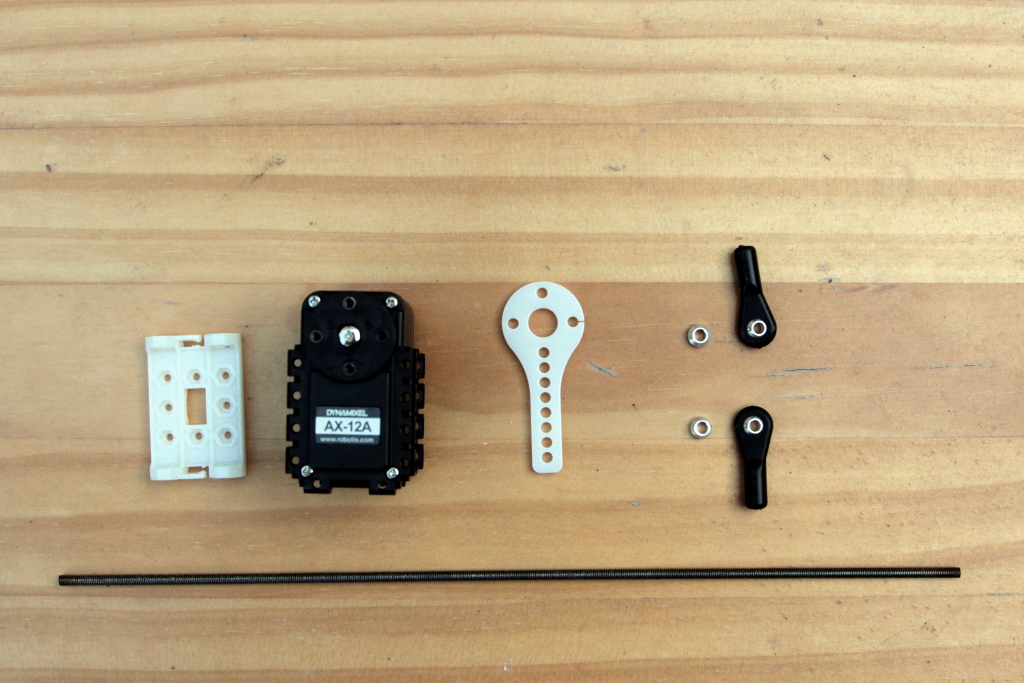
We started building the platform as modeled in Fusion 360. It’s basically made up of an aluminum base, 3D-printed motor brackets, 3D-printed servo horns, threaded rods for the platform legs, ball joints that we bought from ebay, and a 3D-printed platform for a cell phone.
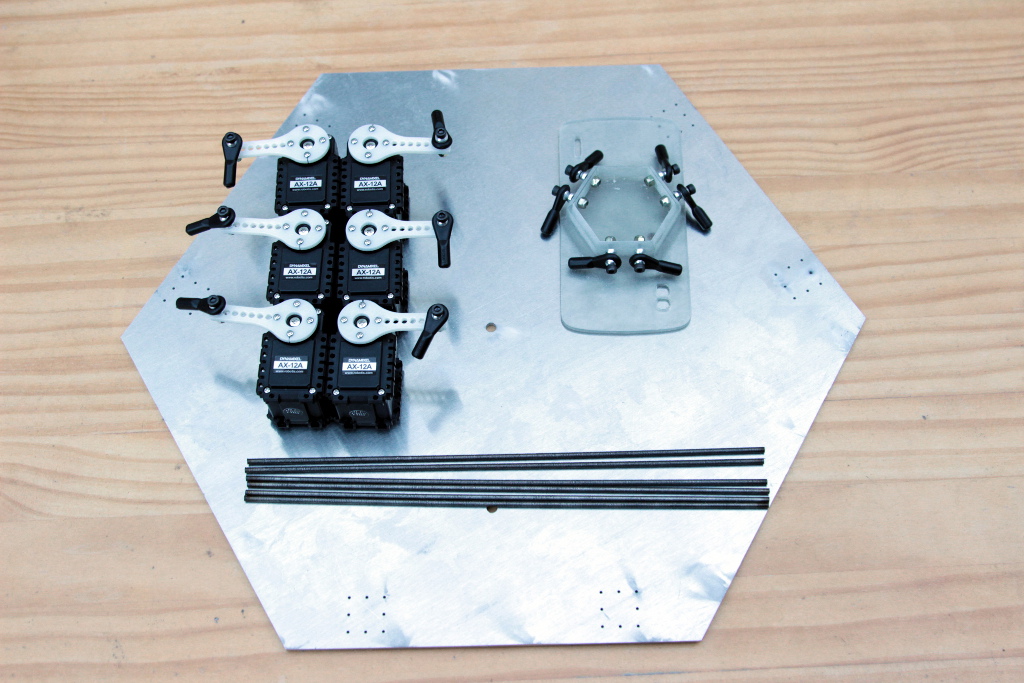
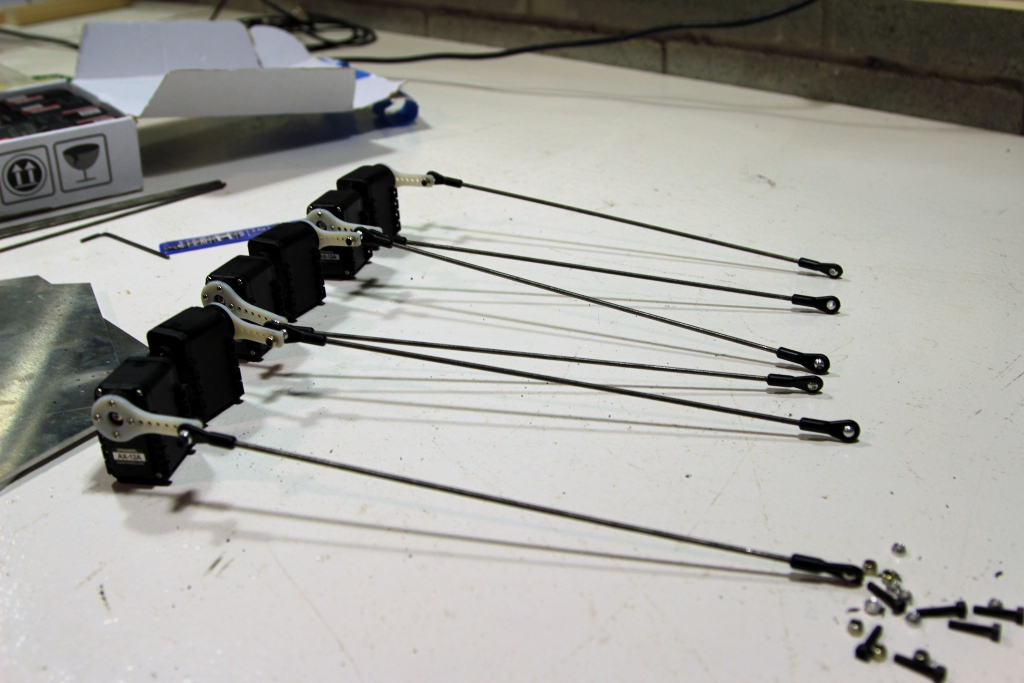

The first final prototype:
